2) Why tensor? (1) Dynamics of a particle in Curvilinear Motion
Mathematics - Tensor Calculus ·We’ve got seen the gradient, divergence, curl, and laplacian of a vector field or scalar function. If you are in engineering course, some of you’re going to take the engineering dynamic course.
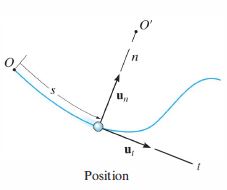
First, we would be informed about general curvilinear motion of a particle along a certain path. Let a length of moving path for a particle from the origin from time $t_i$ to $t_f$ be $s$, and the tangential path of the particle is $t$ and the normal path is $n$.
In calculus, you would learn that in some instantaneous moment, the particle would have a radius of curvature $\rho$ and moves for a distance of $ds$.
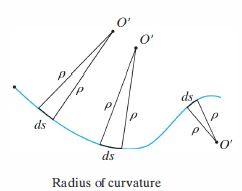
The radius of curvature is described like
If we define $T(t)\,=\frac{r’(t)}{\begin{vmatrix}r’(t) \end{vmatrix}}\,=\,\frac{\mathbb{v(t)}}{\begin{vmatrix}\mathbb{v}(t)\end{vmatrix}}$, then
As you can see that the motion of a particle in which condition stated before also in physics textbook, velocity has a component of direction along the path, and acceleration has components of 1) along the path and 2) perpendicular to the path. They can be expressed like
$\mathbb{v}\,=\,v\mathbb{u}_t $ Where $v\,=\,\dot{s}$
and acceleration is
$\mathbb{a}\,=\,\dot{\mathbb{v}}\,=\,\dot{v}\mathbb{u}_t\,+\,v\dot{\mathbb{u}}_t$
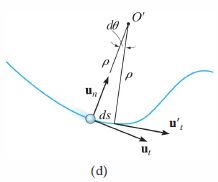
And as we can see that $\dot{\mathbb{u}}_t\,=\,\dot{\theta}\mathbb{u}_n\,=\,\frac{\dot{s}}{\rho}\mathbb{u}_n\,=\,\frac{v}{\rho}\mathbb{u}_n$ in Fig.3, we can find that the acceleration vector $\mathbb{a}$ would be
$\mathbb{a}\,=\,a_t\,\mathbb{u}_t\,+\,a_n\,\mathbb{u}_n$
where $a_t\,=\,\dot{v} // a_t\,ds\,=\,v\,dv$ and $a_n\,=\,\frac{v^2}{\rho}$
Graphically, in planar motion case, where and , and the detail inducing process will be introduced in the post for engineering mechanics dynamics. Acceleration vector, which is the derivative of the velocity vector, is therefore where and .
However, we can derive the the position vector, velocity vector, and acceleration vector out much easily for 1) Cartesian(xyz-)coordinates, 2) Cylindrical(r$\theta$z-)coordinates, and 3) Spherical($\rho\phi\theta$-)coordinates. Excluding all vectors written above for cartesian coordinates(because it is just very simple), all of the stated vectors for cylindrical coordinates and spherical coordinates are like below:
where $x\,=\,r\,cos\theta,\,y\,=\,r\,sin\theta,\,z\,=\,z$ in cylindrical coordinates. in this time, don’t think about the $h_r\,=\,\begin{vmatrix}\frac{\partial \mathbb{r}}{\partial r}\end{vmatrix}\,=\,1$, $h_{\theta}\,=\,\begin{vmatrix}\frac{\partial \mathbb{r}}{\partial \theta}\end{vmatrix}\,=\,r$ and $h_z\,=\,\begin{vmatrix}\frac{\partial \mathbb{r}}{\partial z}\end{vmatrix}\,=\,1$ (It is same in spherical coordinates).
If z-dimension is reduced, the result is same with above, the planar motion of a particle.
where $x\,=\,\rho\,cos\theta\,sin\,\phi,\,y\,=\,\rho\,sin\theta\,sin\phi,\,z\,=\,\rho\,cos\phi$ in spherical coordinates.
Believe or not, you’ll gonna study this kind of weird and, even, seems extremely hard things.
Why these kind hell of things are coming out?
To understand these things, we have to study the 1) (orthogonal) basis vector, and 2) whole differential terms of x,y,z - assume that the variables are just in $R^3$.
Take $q_1, q_2, q_3$ as the general orthogonal basis on $R^3$, $x, y, z$ are transformed to like:
Then a vector $\mathbb{V} $ on this coordinates basis is expressed to
but the position vector
Position vector $\mathbb{r}$ is often related to the cartesian coordinates. In this time, 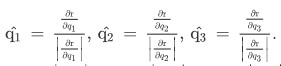 Now, for the convenience of calculation, we take
Now, for the convenience of calculation, we take  so we get
so we get 
and $d\mathbb{r}\,=\,dx\,i\,+\,dy\,j\,+\,dz\,k\,$
We have to define the infinitesimal length $d\mathbb{s}^2\,=\,d\mathbb{r}\,\cdot\,d\mathbb{r}\,=\,\sum_{ij}^{}\,\frac{\partial{\mathbb{r}}}{\partial{q_i}}\,\cdot\,\frac{\partial{\mathbb{r}}}{\partial{q_j}}$
Where $g_{ij}\,=\,\frac{\partial\mathbb{r}}{\partial q_i}\,\cdot\,\frac{\partial\mathbb{r}}{\partial q_j}$
Remember that we consider an “orthogonal” curvilinear coordinates. In this case, $g_{ij}\,=\,0, whose\,i ≠ j$, so there remain the case $g_{11},\,g_{22},\,g_{33}$. we now call the absolute value of $g_{11},\,g_{22},\,g_{33}$ as $h_1,\,h_2,\,h_3$.
By these ways, we can go through above proving method in -3.
- References
- R.C.Hibbeler, 12th Ed., Engineering Mechanics - Dynamics
- James Stewart, 5th Ed., Calculus
- Itskov M., Tensor Algebra and Tensor Analysis for Engineers